This software package introduces the Recursive World Language (RWL), an interpreted language for constructing large virtual scenarios aimed at simulating datasets for mobile robotics SLAM.
- CMake (>=2.4)
- MRPT (1.5.x or >=1.9.9)
In Ubuntu:
sudo apt-get install cmake libmrpt-dev
rwl-compiler: Parses and optionally visualize a virtual world.rwt-dataset-simulator: Loads a virtual world, a robot trajectory description and a sensor type and generates a synthetic dataset.
See Sensors
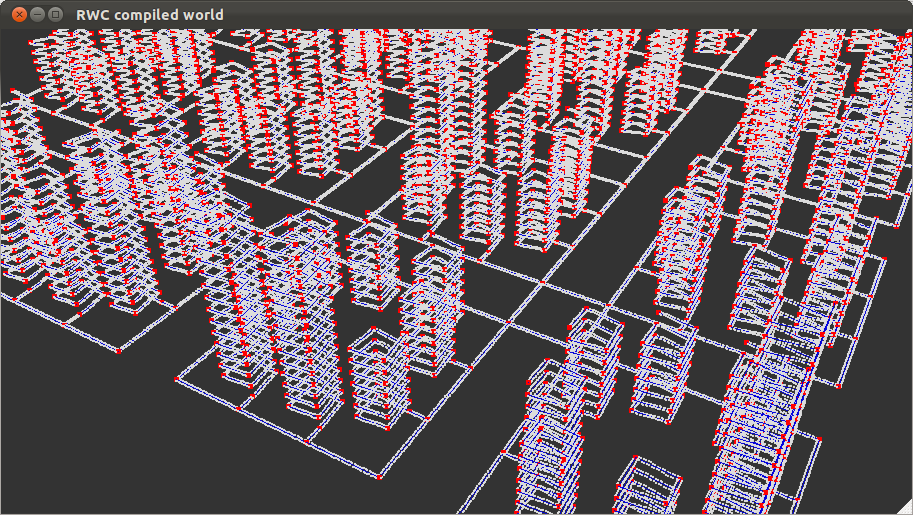
RWL program: world-demo1.wrl
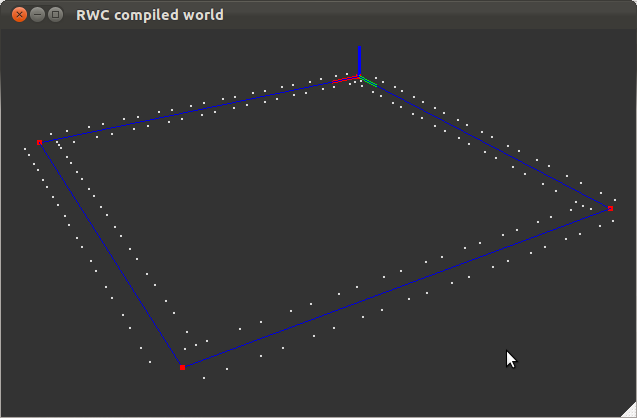
RWL program: world-demo2.wrl
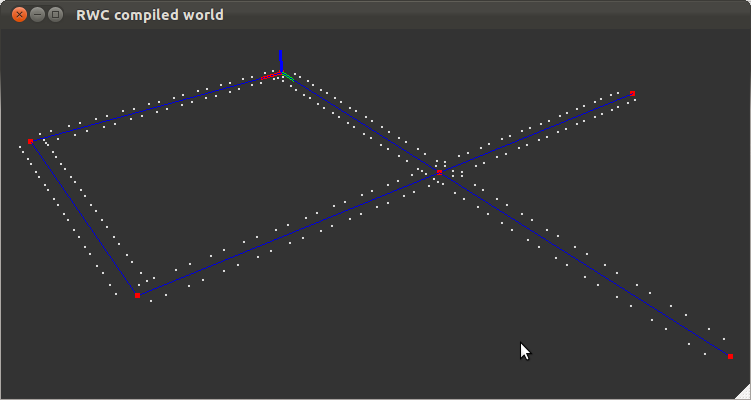
RWL program: world-demo3.wrl